تحلق طرق جديدة تحت سطح البحر

الصور: مودوس قاع البحر التدخل

الصور: مودوس قاع البحر التدخل

الصور: مودوس قاع البحر التدخل
شركة Modus Seabed Intervention Limited ومقرها شمال شرق إنجلترا هي شركة صغيرة نسبيًا ولكن أهدافها طموحة ومركزة. تقارير إلين ماسلين.
بعد أربع سنوات قضيتها في تطوير نظام AUV / ROV هجين (HAUV) استنادًا إلى نظام Saab Sabertooth AUV المعدّل ، اشترت Modus Seabed التدخل الآن منتجها Sabterooth الثاني في المياه العميقة ، والذي سيتم تسليمه هذا الصيف.
سيمكّن الاستحواذ على أحدث منتجات Sabertooth المصنّفة على ارتفاع 3000 متر ، الشركة من مواصلة البناء على سجلها الحافل وتزويد المركبات بقدرات الذكاء الاصطناعي المحسّنة وقدرات الحكم الذاتي.
تتمثل رؤية الشركة في تشغيل HAUVs في مواقعها الخاصة بالنفط والغاز ومواقع الطاقة المتجددة ، بما في ذلك مزارع الرياح ومستقلة عن سفن الخدمات. يمكن أن يكون ذلك عبر نظام نشر سطحي أو عن طريق محطة لرسو السفن / الإرساء تحت سطح البحر ، والتي يمكن أن "تطير" داخلها وخارجها. من منشآت الإرساء ، يمكن أن تعمل السيارة كجهاز AUV (بدون حبل) ، أو باستخدام البطاريات الموجودة على متن الطائرة ، أو عندما تكون هناك حاجة إلى تحكم مباشر ، يمكن أن تعمل مثل ROV إما عبر حبل الألياف البصرية (الذي يتيح رحلات طويلة للغاية) ، أو عن طريق السلطة الكاملة والتحكم السري.
بدلاً من أن يتم نشرها من سفينة دعم مخصصة ، تم تصميم محطة الإرساء ليتم نشرها في قاع البحر من رافعة السفينة. الهدف من ذلك هو استخدام سفينة تعمل بالفعل في موقع محدد ، مثل سفينة إمداد أو DSV أو سفينة خدمة متجددة بحرية. بعد ذلك ، يمكن لـ HAUV إجراء الفحص و / أو المسح بشكل مستقل ، بالتعاون مع النشاط الأساسي للسفينة ، مما يقلل التكاليف. ستعود HAUV إلى قفص الاتهام عند الانتهاء من نطاق العمل وستنتظر استردادها في وقت مناسب. يقول نايجل وارد ، مودوس: "على سبيل المثال ، إذا كنت قد تعاقدت مع سفينة للقيام بتشغيل إمدادات النظام الأساسي ، فيمكنك النزول عن جهاز HAUV في طريقه إلى الخارج ثم التقاطه في طريق العودة بعد الانتهاء من المهمة المحددة مسبقًا". "الضابط التجاري الرئيسي. استنادًا إلى سعة بطارية جهاز HAUV الحالي الخاص بـ Modus ، يمكن تشغيل المسوحات التي تغطي حوالي 60 كم بشحنة مستقلة واحدة ، مع اعتماد وقت المسح على السرعة والحمولة الصافية.
خلفية Modus هي في خدمات حفر الخنادق تحت سطح البحر. عندما كانت الشركة تتطلع إلى الاستثمار في التكنولوجيا الجديدة ، شعرت أن سوق ROV كان ناضجًا ، إن لم يكن مشبعًا ، لذلك سعت Modus إلى تنويع واكتساب Remus AUV بهدف توفير خدمات مسح وفحص منخفضة التكلفة من السفن التي كانت بالفعل خارج العمل. كان القصد من هذا هو التراجع عن السفن وإتاحة الفرصة للـ Remus والقيام بعملها بينما استمرت السفينة في مهمتها الأساسية (بدلاً من استخدام ROV ، وتقييد سفينة دعم ROV. كانت الفوائد تعتبر خطأً إنسانياً مخفضًا. جعل المشاريع الخارجية أسهل ، والحفاظ على الموظفين المهرة في البرية وخفض التكاليف وزيادة السلامة.
لم يكن Remus هو الوسيلة المناسبة تمامًا للأنشطة التي شارك فيها Modus. جاء ذلك مع سونار المسح الجانبي ، لكن العملاء أرادوا قياس الأعماق ، ومثل العديد من أنظمة AUV ، كان من الصعب ترقية السيارة أو تغيير مجسات التطبيقات المختلفة ". "على أي حال ، فإن مركبات AUV الموجودة في السوق ليست في الواقع مستقلة بذاتها ، وغالبًا ما تحتاج السفينة إلى تعقب السيارة خلال نطاق ، والذي في نظرنا هزم كائن الميزة المستقلة".
 الصور: مودوس قاع البحر التدخل
الصور: مودوس قاع البحر التدخل
لذلك ، نظرت مودوس في Sabertooth صعب Seaeye. "إنه تقاطع بين ROV و AUV. أردنا فوائد كليهما. تعد القدرة على تركيب حمولة مستشعر مسح المسح بسرعة وسهولة أمرًا ضروريًا لتلبية متطلبات العملاء. يمكننا استئجار جهاز استشعار ودمجه وتذهب بعيدا.
هناك الكثير من تقنيات الاستقصاء الجديدة التي يتم تطويرها في الوقت الحالي ، لذلك أردنا التأكد من أننا يمكن أن نستخدمها لإثبات السيارة في المستقبل.
"أردنا أيضًا أن نكون قادرين على التحليق مثل ROV ، وأن نحصل على سرعة AUV وأن نكون قادرين على القيام بعمليات مستقلة ذاتياً ، لذلك لا يتعين عليك تكريس سفينة لمطاردة HAUV بنظام تحديد المواقع الأساسي القصير للغاية . شعرنا أن صعب Sabertooth يلبي هذه المعايير.
"تعتمد السيارة ، في عبوتها الأساسية ، على IXBlue Phins3 INS ، وورقة عمل RDI DVL ، مع الحصول على البيانات ، والتنقل ، ومعالجة بيانات الاستشعار التي تديرها QINsy ، والتي تأخذ أيضًا بيانات Novatel DGPS. ومع ذلك ، فإن الحمولة النافعة مرنة ويمكن أن تعمل أيضًا في صفيفات خط الأساس الطويل (LBL) أو مع نظام USBL عند الاقتضاء ، مع Sonardyne AvTrak 6 ، الذي يوفر محول طاقة ، جهاز إرسال واستقبال ، وقياس عن بعد في واحدة "، كما يقول وارد.
في عام 2017 ، أجرت الشركة عروضًا وتجارب ، وكانت HAUV جاهزة للعمليات التجارية في عام 2018. في أحد المشاريع التجريبية في عام 2017 ، تم إطلاق HAUV من رصيف في بحيرة قريبة من مرفق Saab في السويد لأداء "جز استقصاء مبرمج مسبقًا بأسلوب الحشيش يجمع بيانات MBES و SSS و SBP على طول طريق طوله 15 كم ، دون مساعدة خارجية من سفينة الدعم (فقط DGPS و INS و DVL). يقول وارد: "بعد الخروج وتكرار المسح ، لم تشهد الكثير من الانجرافات". كما تم تجربة السيارة بنجاح عدة مرات ، حيث رست بشكل مستقل في مرآب السيارات تحت سطح البحر. في أوائل عام 2018 ، تم تطوير هذه الوظيفة بشكل أكبر ، كجزء من مشروع تموله Innovate UK لفحص سكان مزرعة الرياح. تم تشغيل هذه التجربة في منشأة ORE Catapult في Blyth وتضمن أيضًا اقتران طاقة غير مباشر ونقل البيانات باستخدام موصل حثي Blue Logic.
في المرحلة الأخيرة من هذا المشروع التجريبي الممول ، في وقت لاحق من هذا العام ، وبين التزاماتها التجارية ، ستقوم الشركة بتجربة مفهوم AUV هجين مقيم في مزرعة رياح بحرية في المملكة المتحدة. سيتم إسقاط HAUV ومحطة الإرساء الخاصة بها للقيام بمهمة ، على غرار مظاهرة في منشأة ORE في بليث. في هذه المناسبة ، لن تتفاعل مع أي من البنية التحتية لمزرعة الرياح. يقول وارد: "ومع ذلك ، فإن توصيل محطة الإرساء إلى مزرعة للرياح ، سيكون الوصول إلى الطاقة والاتصالات أمرًا سهلاً نسبيًا" ، حيث يوجد بالفعل بنية تحتية للطاقة والبيانات متاحة بالفعل للعمل في التوربينات التي يمكننا الاستفادة منها. "
 الصور: مودوس قاع البحر التدخل
الصور: مودوس قاع البحر التدخل
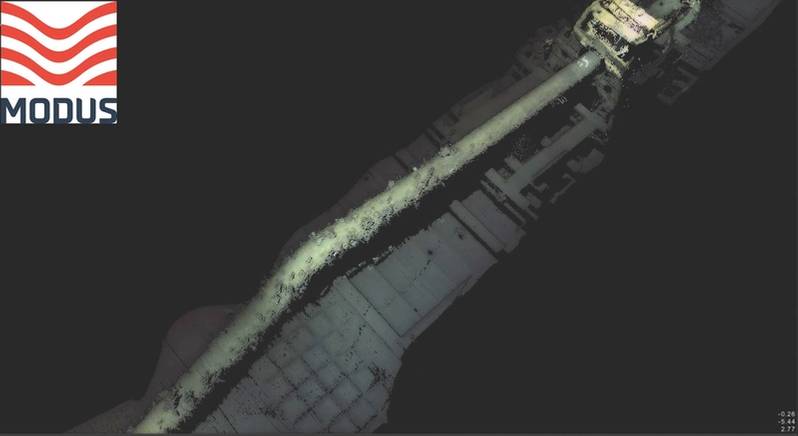
في العام الماضي ، نشر Modus HAUV في الخارج NW NW لإجراء مسح حوالي 240 كم حول سلامة خطوط الأنابيب ، وإنتاج صور مذهلة ، وكذلك بيانات سحابة نقطة لكل من خط الأنابيب والحياة البحرية المارة (انظر الشكل الداخلي مع تفاصيل أسنان سمك القرش) 2knts) باستخدام التنميط بالليزر Cathx Scout والتصوير عالي الدقة المنتشر إلى جانب صدى متعدد الحزم (MBES).
يقول وارد إن وقت المسح كان نصف ما كان سيستغرقه باستخدام ROV التقليدي لإجراء المسح وكان يمكن أن يكون أسرع. "مثل هذا المسح ممكن بدون حبل ، ولكن تم إجراؤه باستخدام حبل في هذه المناسبة بحيث يمكن جمع بيانات الوقت الفعلي."
للملاحة ، استخدمت السيارة مساعدة USBL لمتابعة قائمة موقع التوجيه من المخططات المضمّنة لخط الأنابيب. يمكن دمج هذا مع خوارزمية تتبع الأنابيب المستقلة التي تستخدم بيانات ملف تعريف الأنابيب التي تم جمعها من أجل MBES لمتابعة مسار الأنبوب. هذا مفيد بشكل خاص إذا كان الموضع المدمج غير دقيق والذي قد يكون ناجماً عن عدم الدقة الناتجة عن تحمل الموضع. يقول وارد: "بسبب هذه الأنظمة ، يستطيع AUV ، في الواقع ، رؤية خط الأنابيب ، فهذا يعني أن مساعدة USBL ليست مطلوبة دائمًا لإجراء فحص خط أنابيب ، مما يتيح عمليات مستقلة بعيدًا عن سفن الدعم". "يوفر نظام CathX Laser سحابة عالية الدقة لخط الأنابيب وقاع البحر المجاور. تم الجمع بين الغيوم نقطة الليزر و MBES في مرحلة ما بعد المعالجة واستخدامها لتقييم الموقف و freespans ممكن. إن الدقة العالية جدًا التي يتم الحصول عليها من نظام الليزر تجعله مناسبًا لانحراف التخزين المؤقت وغيرها من استطلاعات المقاييس القائمة على القياس التصويري. "
نظرًا لأن السيارة مستقرة وهادئة ويمكن أن تطير على ارتفاع ثابت فوق خط الأنابيب ، فإن الصور والقياسات الناتجة من السحب التي تعتمد على الليزر ، والتي تم تجميعها مع صور الكاميرا عالية الدقة ، دقيقة للغاية وسهلة المعالجة.
واحدة من الأسواق التي تستهدفها Modus هي الرياح البحرية. غالبًا ما تكون حقول صفيف التوربينات في مناطق ذات تيار عالٍ ، لذلك في عام 2017 ، وضعت الشركة HAUV تحت الاختبار في مصنع للطاقة الكهرومائية في السويد ، حيث أثبتت السيارة ذات القدرة على سرعة 4.5 كيلومتر قدرتها على الحفاظ على موقعها ومناورةها بنجاح في 3 كيلو طن من التيار. في مواقع الرياح البحرية ، غالبًا ما توجد سفن خدمة للسير إلى العمل يتم نشرها في الميدان للقيام بأنشطة الصيانة ، فهذه هي قوارب الفنادق التي تتميز بالكثير من الوقت الزائد عن الحاجة. لقد قمنا بتطوير HAUV لتكون قادرة على نشر واسترداد من هذه السفن أساسا استبدال الحاجة إلى تعبئة سفينة ROV للقيام بأنشطة التفتيش. يجعل سفينة الخدمة أكثر قيمة.
بالنسبة إلى Modus ، لا يقتصر الأمر على الفحص البصري. قامت الشركة أيضًا بتجربة نظام FIGs الخاص بشركة Force Technology ، والذي يمكنه إجراء استطلاعات الحماية الكاثودية من عدم الاتصال في 4knts ، جنبًا إلى جنب أثناء إجراء مسح GVI.
يقول وارد: "صمّم ساب مركبة قوية تحت سطح البحر وقمنا بتطويرها بشكل أكبر بحيث يمكن تشغيلها كأداة مسح وفحص رائدة على مستوى العالم". "لقد ركزنا على كيفية دمج أجهزة الاستشعار ، وكيفية التحدث مع بعضهم البعض ، وبرامج المهمة ، ونحن نتحرك الآن إلى قدرات الذكاء الاصطناعي والتعلم الآلي. يمكننا بالفعل أن نقول "اذهب هنا ، إذا رأيت خط أنابيب ، اتبعه ، أو إذا رأيت خطًا احتكاريًا ، فقم بإجراء فحص حول محيطه". وقد تجلى كل هذا في التجارب. المجموعة التالية من التطورات المستقلة ستكون مثيرة للغاية. على المدى القريب ، نريد تطوير مسار HAUV ومسح الكابلات المدفونة بشكل مستقل. يتم حاليًا اختبار تقنيات تتبع الأنابيب المختلفة. من المتوقع أن يكون هذا تطوراً سريعًا حيث يمكننا استخدام خوارزميات مشابهة لتلك المستخدمة في تتبع خطوط الأنابيب المرئية. "
لم تكن رحلة سهلة ، لكن وارد يرى أن البعض يرى الإمكانات. يقول: "لا شك في أننا واجهنا تحديات في طرح هذه التكنولوجيا في السوق". "في المقام الأول ، ترغب العديد من الشركات في القيام بعمليات التشغيل بالطريقة التي تتبعها دائمًا ، على سبيل المثال ، لا يزال بعض المشغلين يحددون كاميرات ROV ورافعات الرفع لتفتيش خطوط الأنابيب. ولكن هؤلاء العملاء الذين تبنوا HAUV ، والتي تتطلب منهجًا مختلفًا قليلاً لمعالجة GVI ، جنىوا الفوائد في توفير التكاليف وتحسين جودة البيانات.
"HAUV تعمل بشكل تجاري بالكامل منذ ما يقرب من عام الآن ، ولديها سجل حافل ومتزايد ونحن متحمسون للغاية لمزيد من التحسينات والميزات التي نخطط للتكليف بها على مدار الأشهر المقبلة ، بالإضافة إلى الترحيب بنا على HAUV الثاني في الأسطول في غضون بضعة أشهر ".
اكتشاف فتحات حرارية مائية تحت سطح البحر في منطقة الركود الاستوائي
. اكتشف العلماء حقلين جديدين للفتحات الحرارية المائية في منطقة دولدرومز، وهي إحدى أقل مناطق المحيط الأطلسي استكشافًا، وتحديدًا في منطقة التحول والصدع الضخمة. يمتد هذا النظام التكتوني النشط عبر سلسلة جبال منتصف المحيط الأطلسي، التي تُشكل أطول سلسلة جبال في العالم. تُعد هذه الأنواع من حقول الفتحات نادرة نظرًا لأنظمة \"الأنابيب\" الهجينة فيها، والتي تتميز بخصائص نموذجية للفتحات الحرارية المائية.")
كسر الجمود في أبحاث القطب الشمالي

التعمق أكثر: التحديات والاتجاهات في صناعة التجريف

غرس بذور الإلهام: استعادة الأعشاب البحرية

من عدم اليقين إلى الميزة: معهد وودز هول لعلوم المحيطات يطلق مبادرات جديدة لشركاء الصناعة
 بنشر أنظمة رصد المحيطات المستخدمة لجمع بيانات بيئية واقعية لدعم اتخاذ القرارات التشغيلية، والنمذجة، والرصد طويل الأجل للمحيطات. © معهد وودز هول لعلوم المحيطات")
تصميم حلقات منع التسرب الدائرية، الجزء 2: موانع التسرب الشعاعية للضغط الخارجي
")
توسيع نطاق الأسطول غير المأهول: من السفن الفردية إلى العمليات على مستوى النظام

فريق بحثي من معهد شميدت للمحيطات يكتشف 31 نوعاً جديداً

تعتزم شركة أوكوس تطوير مركبات تحت الماء غير المأهولة، ومن المقرر تسليمها في عام 2027

شركة فارد تفوز بطلب قياسي بقيمة 800 مليون دولار لسفينة أبحاث أعماق البحار
-171000 "RV11000 من تصميم VARD 9 42 لـ Inkfish (حقوق الصورة: Vard)")
قامت شركتا أورستد وبي جي إي بتركيب أولى الأساسات في مزرعة رياح بالتيكا 2 البحرية في بولندا
-170484 "(حقوق الصورة: فان أورد)")
MTR100: تحديد رواد الأعمال في مجال الصناعات تحت سطح البحر - باب التقديم مفتوح
