تصميم UUV الدفع المعاصر


من وجهة نظر في قيادة المركبات الفيزيائية ، فإن مركبة تحت الماء غير مأهولة (UUV) تختلف قليلاً عن قارب التزلج الشخصي أو الناقلة. تشترك الشركة في نموذج نظام الدفع-الدفع ، الذي يسمح للدفع بتحويل طاقة محرك الأقراص إلى قوة دفع بغرض نقل السفينة. تعتبر المبادئ الأساسية لتوازن الدفع والحركة شائعة بين الثلاثة ، وكذلك ترجمة الطاقة الدورانية إلى الدفع المحوري عن طريق العنصر المركزي في النظام - Propulsor.
لا تشترك أنواع المركبات المختلفة في القيود وأهداف التصميم الفريدة في مهمة كل مركبة. على سبيل المثال ، قد يحتاج قارب التزلج إلى قوة دفع عالية عند سرعات القطر وهو على استعداد للتخلي عن السرعة القصوى المحتملة لتحقيق متطلبات هذه المهمة. تم تصميم نسبة انتقال وخصائص المروحة لهذا الغرض. قد تحتاج الناقلة إلى أعلى كفاءة لها في "سرعة الأعمال" لأعلى عائد مالي. أو قد يكون هناك قيود إضافية على الانبعاثات أو تقليل الوقود ، مما يتطلب التوصل إلى حل وسط في تصميم المروحة.
تحتوي المركبات الموجودة تحت الماء على مجموعة من متطلبات تصميم الدوافع الخاصة بمهامها المختلفة ، مثل عمر البطارية (أو المسافة الأكبر المقطوعة لميزانية البطارية) ، أو أقصى قطر للجسم ، أو أقل سرعة تشغيلية ، أو النظر في الأكفان أو الفوهات لتحقيق الكفاءة الهيدروديناميكية أو السلامة من اتصال المروحة ، أو الحد من الضوضاء لضمان عملية هادئة لجمع البيانات. هذا هو الإعداد لتصميم UUV الخاص بالدفع في HydroComp ، ويبدأ بمقابلة العميل لجمع المعلومات الهامة حقًا لمشروع تصميم ناجح. نموذج Vessel-Propulsor-Drive هو إطار جيد لمثل هذه المناقشات.
وعاء
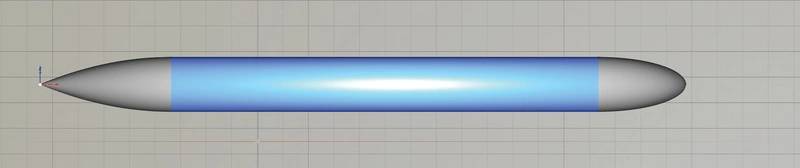
نموذج UUV النموذجي هو هيكل بدن ثوري (يُطلق عليه أيضًا شكل محوري متماثل) يحتوي على الأنف والجسم والذيل. من أجل الحد الأقصى من الحجم الداخلي للمعدات ، فإن بعض المركبات لديها أنف قصير للغاية وذيل. كما قد تتوقع ، هناك عقوبة معينة لسحب الأنف كليًا وعقوبة الدفع للتدفق في الدافع غير المحوري ولكن على طول منحدر حاد. إن جزءًا من عملنا هو تحقيق التوازن بين الجزء المختلف من المقاومة - عملية صنع الأمواج أو سحب الضغط مقابل السحب الاحتكاكي أو اللزج - للحصول على النتيجة الأقل مقاومة إلى الحجم. في الواقع ، هذا ليس صحيحًا تمامًا. نحن نريد حقاً نتيجة أقل قوة إلى حجم ، وستؤثر هندسة الذيل بشكل كبير على قدرة الدفع على تطوير قوة دفع محورية مفيدة من الطاقة الدورانية.
لذلك ، فإن العديد من مشاريع تصميم الدوافع تبدأ بالتنبؤ بسحب السيارة ومعاملات بدفع الجسر (جزء الاستيقاظ وخصم الدفع) باستخدام برنامج NavCad® لمحاكاة النظام الهيدروديناميكي والدفعي. توفر وحدة مركبة غاطسة محددة قدرات تنبؤ قوية لنماذج هياكل UUV مثل طوربيد.
 الصورة: محرك Hydrocomp
الصورة: محرك Hydrocomp
على الجانب الآخر من Propulsor هو محرك الأقراص ، الذي سيكون عادة محرك كهربائي. تختلف المحركات من حيث الخصائص الكهربائية ، ولكن البيانات المهمة لتصميم الدفع هي منحنى قدرة المحرك- RPM الميكانيكي عند العمود. من المهم بالطبع أن تكون طاقة الإدخال الكهربائية "المنبع" مهمة ، وتوفر قيدًا تشغيليًا. نحن نميز الطاقة الكهربائية المدخلة بمنحنى كفاءة المحرك ، مما يساعد على الإجابة على السؤال: ما هو نطاق العائد الأمثل للقيمة في الدقيقة إذا كانت أطول عمر للبطارية هو أعلى أولوية؟ ومن ناحية أخرى ، فإن المنحنى RPM في طاقة المنحنى هو الذي يخبرنا بـ RPM عن أقصى طاقة ممكنة للمحور ، وبالتالي ، RPM لأقصى قوة دفع ممكنة وسرعة السيارة.
كما يمكنك أن ترى من منحنيات المحرك التمثيلية لطاقة المحور والكفاءة الكهربائية مقابل RPM ، فإن أعلى طاقة محتملة نادراً ما تحدث (على الإطلاق) عند أعلى كفاءة مدخلات كهربائية. لذلك ، يتعين علينا في كثير من الأحيان تحديد نقطة تصميم RPM كحل وسط لا يعطي خرج الطاقة الأعلى ولا أفضل كفاءة كهربائية.
من المهم أيضًا لأي مناقشة حول UUVs التي تعتمد على المحرك أن تكون RPM RPM دائمًا مرتفعة جدًا دائمًا لتشغيل الدفع الأمثل. ليس من غير المألوف رؤية شكل من أشكال التزويد لتحقيق أداء أفضل للدفع - أو قبول أن الدافع قد يعمل بكفاءة متوسطة.
توربينات
ستلاحظ استخدام مصطلح "propulsor" بدلاً من "propeller". هذا هو تعزيز المفهوم بأن الفوهة والمروحة (كما هو موجود في معظم UUVs وغالبا ما تسمى "الدافع" للمركبة) هي وحدة تفاعلية ، Propulsor. تصميم الدافع هو مزيج من العثور على أفضل المروحة والفوهة (وتسمى أيضا القناة أو الكفن) مع تتبع تفاعلها. بمعنى آخر ، يجب استخدام أدوات التصميم التي تتضمن هذا التفاعل ، مثل NavCad لنمذجة النظام أو PropElements® لتصميم مكون المروحة - فوهة.
في جميع مشاريع تصميم UUV ، هدف عالمي واحد هو تطوير الهندسة التي تولد أعلى نسبة الدفع إلى القدرة (كفاءتها) ، والتي نحققها باستخدام ممارسات راسخة. هو عموما تأثير محركات التصميم الخارجي التي يمكن أن تجعل تصميم UUV ناجحة ناجحة للغاية. على سبيل المثال ، يمكن أن يكون العائد لكل ألف ظهور مرتفعًا جدًا (كما هو موضح أعلاه). يمكن أن تحد القيود الهندسية من الحد الأقصى للقطر (لضمان بقاءه داخل قطر الجسم) أو يمكن أن تؤثر على التصميم لمحاسبة انحدار ذيل السيارة.
من المهم أن نأخذ لحظة ونذكر الآثار المترتبة على تصنيع UUV propulsor. هناك نقاش كبير في الصحافة حول التصنيع الإضافي (AM) للمراوح. على الرغم من أن هذا قد يكون جذابًا من وجهة نظر مالية وقابلية للتسويق ، يجب علينا أن نهتم بأن الأداء لا يتأثر بنسيج السطح غير المناسب (الذي يمكن أن يكون له تأثير هائل على دسم الحجم الصغير الموجود في معظم UUVs) ، أو فشل قوة الإجهاد ، أو الثنية المائية المرنة في النصل. طورت HydroComp ممارسات ناجحة لاستخدام AM للدفعات الصغيرة من خلال مجموعة متنوعة من مشاريع البحوث الداخلية.
ما وراء هذه الاعتبارات التصميمية العملية ، واحدة من برامج التصميم المعاصرة الأكثر إثارة للاهتمام موضوع الضوضاء المشعة. كجزء من مبادرة الاستدامة الأوسع نطاقا ، طورت HydroComp خبرة في التنبؤ والتخفيف من hydroacoustics الدوافع (المصطلح الذي يلتقط الضوضاء والاهتزاز). كما يتم توفير هذه المعرفة لمهندسي ومهندسي البحرية الآخرين حيث يتم تطوير ميزات صوتية مائية جديدة لأدواتنا. إن حساسية المشروع للضوضاء هي الآن جزء من المناقشة مع عملاء هندسة تصميم UUV.
كل الإثارة الصوتية المائية هي من تذبذب الكتلة (الحركة الدورية للكتلة السائلة). عادة ما يحدث هيدروكويستيك مدفوعة الدفع عن طريق الاختلافات في مناطق الضغط المنخفض للمروحة أثناء تدويرها داخل وخارج المناطق "المظللة" ، مثل خلف دعامة أو زعانف تحكم. جزء من التذبذب هو ببساطة من التغيير في اتجاه التدفق حول الشفرة الناجم عن التدفق المتدفق ، ولكن بشكل أكثر أهمية من خلال التوسع السريع وانهيار التجويف على الشفرة. يتم تقييم كل من هذه كجزء من تصميمنا الدفعي ، مع التخفيف حسب الحاجة بالتغييرات التي تطرأ على الخطوط العريضة للشفرة وتوزيعها على الكامب.
كما يمكن مساعدة الإثارة الهائلة - الصوتية - والإرسال - باستخدام تصميم فوهة إبداعي. باستخدام خبراتنا في نمذجة أداء الفوهة ، يمكننا النظر في ما إذا كانت الهندسة الفوهة ذات الضجيج المحددة يمكن أن توفر القمع الضروري ، بالإضافة إلى أي خسارة لكفاءة الدفع.
لذلك ، في حين أن تصميم UUV لديه مجموعة من التحديات الفريدة ، فهو لا يزال مجرد مهمة مكون ضمن مشكلة نظام أكبر. يمكن أن تقدم تحديا هندسيا مرضيا ، يمكن أن يكتمل بنجاح مع القليل من العناية ، والأدوات المناسبة ، والخبرة العملية.
نبذة عن الكاتب
 دونالد ماكفيرسون ، المؤلف.
دونالد ماكفيرسون ، المؤلف.
يعتبر دونالد ماكفيرسون ، المتخصص الرائد في محاكاة نظام الدفع ، المدير التقني لشركة HydroComp ، حيث يشرف على جميع خدمات تطوير البرمجيات والهندسة. تخرج من معهد ويب ، وهو زميل في SNAME وعضو في فريق الدفع الديناميكي.
اكتشاف فتحات حرارية مائية تحت سطح البحر في منطقة الركود الاستوائي
. اكتشف العلماء حقلين جديدين للفتحات الحرارية المائية في منطقة دولدرومز، وهي إحدى أقل مناطق المحيط الأطلسي استكشافًا، وتحديدًا في منطقة التحول والصدع الضخمة. يمتد هذا النظام التكتوني النشط عبر سلسلة جبال منتصف المحيط الأطلسي، التي تُشكل أطول سلسلة جبال في العالم. تُعد هذه الأنواع من حقول الفتحات نادرة نظرًا لأنظمة \"الأنابيب\" الهجينة فيها، والتي تتميز بخصائص نموذجية للفتحات الحرارية المائية.")
كسر الجمود في أبحاث القطب الشمالي

التعمق أكثر: التحديات والاتجاهات في صناعة التجريف

غرس بذور الإلهام: استعادة الأعشاب البحرية

من عدم اليقين إلى الميزة: معهد وودز هول لعلوم المحيطات يطلق مبادرات جديدة لشركاء الصناعة
 بنشر أنظمة رصد المحيطات المستخدمة لجمع بيانات بيئية واقعية لدعم اتخاذ القرارات التشغيلية، والنمذجة، والرصد طويل الأجل للمحيطات. © معهد وودز هول لعلوم المحيطات")
تصميم حلقات منع التسرب الدائرية، الجزء 2: موانع التسرب الشعاعية للضغط الخارجي
")
توسيع نطاق الأسطول غير المأهول: من السفن الفردية إلى العمليات على مستوى النظام

فريق بحثي من معهد شميدت للمحيطات يكتشف 31 نوعاً جديداً

تعتزم شركة أوكوس تطوير مركبات تحت الماء غير المأهولة، ومن المقرر تسليمها في عام 2027

شركة فارد تفوز بطلب قياسي بقيمة 800 مليون دولار لسفينة أبحاث أعماق البحار
-171000 "RV11000 من تصميم VARD 9 42 لـ Inkfish (حقوق الصورة: Vard)")
قامت شركتا أورستد وبي جي إي بتركيب أولى الأساسات في مزرعة رياح بالتيكا 2 البحرية في بولندا
-170484 "(حقوق الصورة: فان أورد)")
MTR100: تحديد رواد الأعمال في مجال الصناعات تحت سطح البحر - باب التقديم مفتوح
