الروبوتات: الجنرال التالي في المركبات تحت سطح البحر


MUMs (وبنات) من الاختراع: ألهمت البحر و MUMs هي مصدر إلهام لجيل جديد من الأنظمة والسيارات تحت الماء. الين ماسلين يأخذ نظرة.
قائمة المتقدمين لدخول المجال تحت الماء ينمو بسرعة. تختلف المفاهيم ، من الأمهات المستقلة تحت الماء القادرة على حمل مجموعة من الحمولات عبر مسافات طويلة إلى أسراب من نقاط القاع المحيطية المنتشرة والتي يمكن أن تجد طريقها إلى مواقع مبرمجة مسبقًا.
في مجال الطاقة: متصلاً ، كما يُطلق على مجموعة وادي سوبسي فالي في أوسلو والمؤتمر السنوي ، تم تحديد بعض هذه المفاهيم ، بما في ذلك تلك الخاصة بشركتي تكنولوجيا نرويجيتين وتيسنكروب الألمانية ، وهي شركة مستخدمة أكثر لتصميم أنظمة الغواصات البحرية.
USEA تكشف النقاب عن uLARS
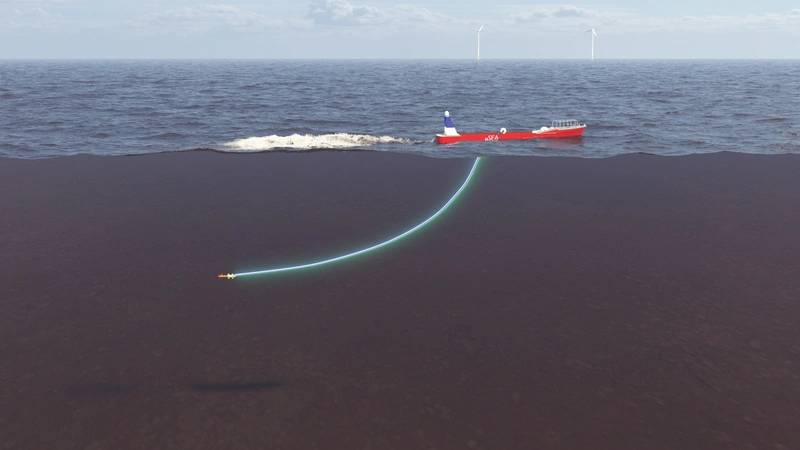
أحدها ، بدء تشغيل التكنولوجيا النرويجية uSEA ، يقترح نظامًا هجينًا لتعطيل العمليات البحرية الحالية المدعومة بواسطة السفن عبر مزيج من سطح البحر والطائرة بدون طيار.
تأسست uSEA في عام 2017 ومنذ ذلك الحين تقوم بتطوير طائرة بدون طيار سطحية ، أو سفينة سطحية غير مأهولة (USV) ، لدعم الطائرات بدون طيار تحت الماء (أي المركبات ذاتية الحركة تحت الماء أو AUVs) ، بحيث لم تعد هناك حاجة إلى السفن المأهولة وإعادة شحن البطارية القيام به في الماء ، وتجنب عمليات الاطلاق والاسترداد. هذا يجعلها مختلفة عن غيرها من مفاهيم الطائرات بدون طيار السطحية ، والتي تميل إلى الاعتماد على الانتعاش الكامل لل AUV أو السيارة التي تعمل عن بعد (ROV) لإعادة الشحن. يُطلق على نظام uSEA اسم uLARS (نظام LARS الذي يعني إطلاق واسترداد) للطائرات بدون طيار ، كما يقول الرئيس التنفيذي لشركة uSEA فيليبي ليما ، الذي عمل في البحرية البرازيلية قبل العمل في Subsea 7 و Aker Solutions و Xodus Group.
إنه تقدم طبيعي. يقول ليما إن سيارات AUV اليوم أصبحت أكثر قدرة وموثوقية. "إنهم يأخذون المساحة التي كانت الفناء الخلفي لروفس. ولكن ، لديهم قيود ؛ إنهم يعتمدون على البطاريات ، لأنهم ليسوا محصورين مثل ROVs ، ولا يزالون بحاجة إلى أم ، على سبيل المثال. سفينة مسح ، لأن بطارياتها تنفد في 12-48 ساعة. مع محطة لرسو السفن المتنقلة ل AUV ، أنت لا تعتمد على محطة لرسو السفن في قاع البحر ولا تحتاج إلى سفينة سطحية أكبر. "
 واجهة الإرساء تحت الماء من uSEA (صورة: uSEA)
واجهة الإرساء تحت الماء من uSEA (صورة: uSEA)
يشتمل النظام على رأس سحب غاطس ، مع موصل حثي للشحن ونقل البيانات ، والذي يشبه إلى حد ما التزود بالوقود في الطائرات النفاثة. يقول ليما ، وهو حاصل على درجة الماجستير في الهندسة البحرية من جامعة أبردين وشهادة ماجستير في الابتكار وريادة الأعمال من جامعة أوسلو: "هذا يعني أن هناك تأثير ضئيل من الأمواج لأن الإرساء في عمق متحكم فيه". هناك أيضًا نظام معالجة يستند إلى مجموعة أحواض السباحة لاستعادة AUV على سطح السفينة بأمان.
سيدعم النظام المسح تحت سطح البحر في المياه الضحلة وكذلك في المياه العميقة والعميقة للغاية ، ويعمل على مجموعة واسعة من الحمولات التي تتراوح من أنواع أكثر تقليدية مثل السونار المسح الجانبي والصدى متعدد الحزم إلى أكثر تقدماً مثل السونار ذي الفتحة الاصطناعية.
تبحث USEA عن شركاء لإكمال برنامج التأهيل ، والذي يتوقع أن يتم بحلول نهاية العام المقبل (2020). بعد ذلك ، تستهدف الشركة العمليات في البحر وتبحث عن مشاريع تجريبية لأداءها في عام 2021.
و iDROP في المحيط
تخطط شركة تكنولوجيا نرويجية أخرى ، iDROP ، لتعطيل سوق التكنولوجيا الزلزالية لقاع البحر مع العقد المحيطية المتمتعة بالحكم الذاتي. يعتمد نظام iDROP على عقد مستشعر أسطواني فردي (يحمل اسم حوريات البحر اليونانية) التي تم نشرها باستخدام قطرة الجاذبية وتحول الصابورة للدفع والتحكم في الموقع ، للهبوط في مواقع محددة مسبقًا في قاع البحر حيث تهبط على أرجل ألومنيوم انبثقت قبل أن تهبط.
 و iDROP في Oceanid. في الأساطير اليونانية ، Oceanids هي الحوريات الذين كانوا 3000 من بنات Titans Oceanus و Tethys (الصورة: iDROP)
و iDROP في Oceanid. في الأساطير اليونانية ، Oceanids هي الحوريات الذين كانوا 3000 من بنات Titans Oceanus و Tethys (الصورة: iDROP)
والفكرة هي أنه يمكن نشرها في مجموعات ، والسقوط لتشكيل أنماط الشبكة في قاع البحر لإجراء المسوحات الزلزالية. تعمل البطاريات المدمجة على التحكم في الهبوط (باستخدام 5٪ فقط من البطارية) ، وجمع البيانات (لمدة 180 يومًا) وتشغيل آلية تطلق صابورة 30 كجم - مصنوعة من ملاط الملح - مما يسمح للوحدات بالانزلاق مرة أخرى إلى السطح ، مرة أخرى ، تحت السيطرة حتى أنها تهدف نحو الهدف المتوقع. ثم يقوم نظام سطح به ترتيب من نوع حزام سير عائم بتجميعها: "هناك مجموعة متنوعة من تقنيات الاستحواذ الزلزالي التي يتم سحبها بشكل أساسي" ، كما يقول Kyrre J Tjøm ، مؤسس iDrop ومديرها التنفيذي ، الذي سبق له العمل في Schlumberger واستشار معه حلول جينو لقاع البحار وقاع البحار. هناك أيضًا عُقد موضوعة على قاع البحر بواسطة ROV. هناك آخرون حيث يمكنك إلقاءهم على الجانب مع الصابورة الخرسانية وبعض البدائل الدفع. سيقوم نظامنا بإزالة الحاجة للسفن التخصصية الكبيرة ذات آلات المناولة الثقيلة وعمليات ROV المستهلكة للوقت ".
كما يمكن نشر مجموعات من Oceanids بسرعة ويمكن زيادة دقة نقطة الاستشعار (أي تغطية المنطقة وبالتالي مقدار البيانات التي يمكن استرجاعها) ، كما يقول. هذا بفضل 69 درجة لقدرة الإزاحة الجانبية المستقلة الرأسية ، مع "سقوط" كل عقدة في موضع محدد مسبقًا. "إذا كنت ترغب في نشر جهاز استشعار على عمق 1200 متر من المياه ، فيمكنك الوصول إلى مسافة كيلومترين من الوعاء السطحي وتثبيت قطعة من المستشعرات بدلاً من خط" ، كما يقول.
يقول Tjøm إن مجموعات من تسع عقد ، كل منها يحتوي على مودم حثي ومستجيب ومستجيب للحمل الزلزالي ، يمكن نشرها في 15 دقيقة ، مما يوفر 10 أضعاف الوقت مقارنة بالطرق الثابتة. سيتم استخدام التوأم الرقمي ، القائم على النمذجة والاختبار الموسعة ، للمساعدة في تحديد أي تأثير على البيئة ، على سبيل المثال. الأمواج ، الحالية ، العمق ، وما إلى ذلك ، وبالتالي تمكن من السيطرة على النسب.
يقول Tjøm: "إننا نتطلع إلى إحداث ثورة في طريقة تثبيت العقد في قاع المحيط في قاع البحر". "يقوم المنافسون بأداء ما بين 40 و 170 يوميًا ويحتاجون إلى روفين ، أنظمة مناولة العقدة التي تسيطر عليها موانئ دبي ، سفينة كبيرة وطاقم متخصص. كلما ذهبت أعمق ، أصبحت ROVs أبطأ لأنها تحتاج إلى مزيد من الدفع لسحب الحبل السري. سنفعل أقل من 1000 شخص في اليوم مع طاقم بحري عادي. "
لقد تم وضع الكثير من العمل في مشروع Oceanids وراء الكواليس والآن فقط يتم الترويج لهذه التكنولوجيا. في الواقع ، بدأ المشروع في عام 2010 ، مع نموذج أولي تم بناؤه في 2013/2014. قامت iDROP أيضًا ببناء نظام الاسترداد وأجرت اختبارًا داخليًا للتحقق من نظام الاسترداد. ومن المزمع إجراء اختبار تجريبي ثانٍ للحصول على بيانات زلزالية ثلاثية الأبعاد في المياه العميقة هذا العام في بحر الشمال. تم بناء تسع سيارات وكان من المقرر أن تذهب إلى الخارج للاختبار في النصف الأول ، مع المزيد من المخطط أن يتم بناؤها في العام المقبل.
أمي هي الكلمة
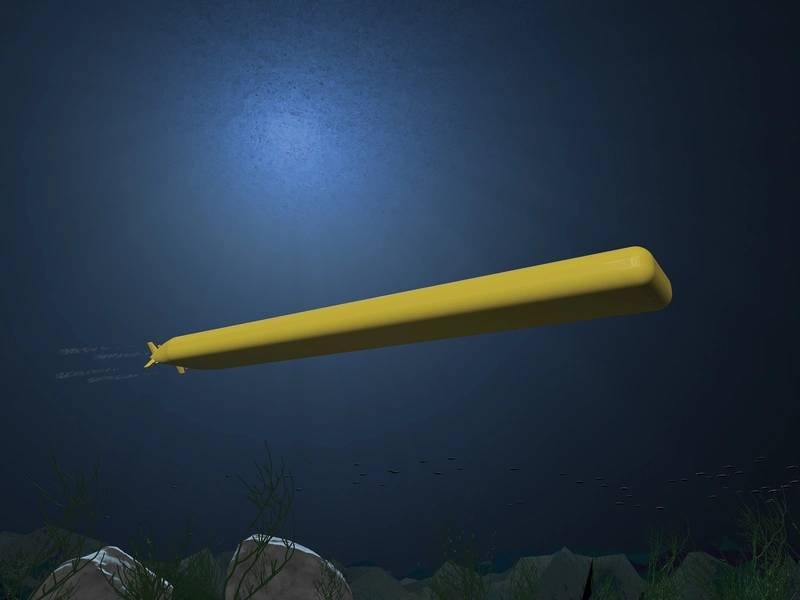
تعمل Thyssenkrupp Marine Systems (MS) ، وهي جزء من التكتل الصناعي الألماني ، على نطاق مختلف لكل من uSEA و uLARS. تقوم الشركة بتصميم سيارة كبيرة الحجم (يصل طولها إلى 50 متراً) بدون طيار (UUV) ، تسمى الأم القابلة للتعديل تحت الماء (MUM) ، بناءً على تصميم وحدات ، وتتضمن وحدات أساسية ومهمة.
التفكير وراء ذلك هو أن سوق السيارات تحت سطح البحر اليوم تهيمن عليه المنتجات المتخصصة ، مع عدم وجود مركبة واحدة يمكن استخدامها في مهام متعددة. يقول ويليم هندريك فاينر ، المشرف على المشروع في Thyssenkrupp MS ، لذلك ، بدأت Thyssenkrupp في تصميم نظام معياري.
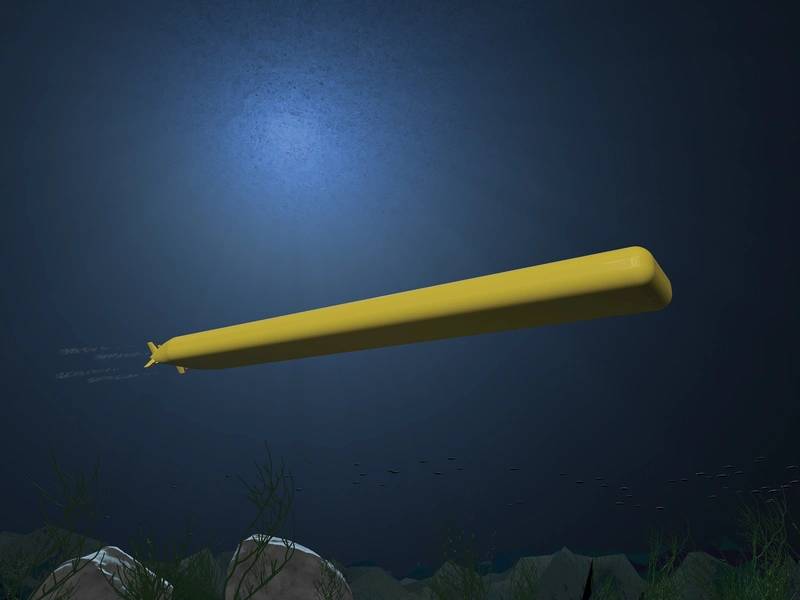 مفهوم MUM الخاص بـ Thyssenkrupp (الصورة: Thyssenkrupp)
مفهوم MUM الخاص بـ Thyssenkrupp (الصورة: Thyssenkrupp)
الوحدات الأساسية هي أنظمة القطع والغطس ، البطارية ، الدفع وخلية وقود الهيدروجين. بعد ذلك ، يمكن أن تتراوح الوحدات المركزة على المهمة من نشر العقدة الزلزالية في قاع المحيط (> 1000 OBNs) إلى أنظمة الحفر الأساسية ، أو من وحدة التحكم تحت سطح البحر إلى الخروج لاستضافة المركبات التي يتم تشغيلها عن بُعد ، والتي ستستخدم UUV الكبيرة كسفينة رئيسية. تتألف مجموعة وحدات MUM من وحدات تحتوي على حاويات بحجم 20 قدم أو 10 قدم قياسية. يمكن دمجها وفقًا لمواصفات المهمة التي تؤدي إلى مركبات مختلفة تمامًا ، من 80 طنًا متريًا إلى أكثر من 300 طن متري ، أو من 20 مترا ، عرض 4 أمتار و 3 أمتار إلى حوالي 50 مترا ، عرض 7 أمتار و 3 أمتار عالية ، مع استهلاك الطاقة يعتمد على الحمولة وسرعة الدفع.
يقول Wehner: "يوجد لدى المركبات الأخرى التي تعمل تحت الماء مقاربات معيارية ، ولكن بشكل أساسي من حيث تكييف قسم الحمولة أو زيادة القدرة على التحمل بإضافة المزيد من الطاقة". "مثال جيد على ذلك هو SeaCat AUV من ATLAS ، والذي يمكنه تغيير حمولته عن طريق تبديل رأس السيارة ويمكنه تمديد المدى بإضافة المزيد من سعة البطارية."
يقول وينر إن مركبة MUM ستكون قادرة على السفر لمئات الأميال ، اعتمادًا على تكوين السيارة ، مع طاقة خلايا الوقود الهيدروجينية 80-160 كيلو واط ، وعمق المياه حتى آلاف الأمتار. "النطاق تحت الماء قابل للتطوير وفي منطقة 100s من الأميال البحرية. وهو ما يكفي تمامًا لحالات الاستخدام الحالية ". "إن نظامنا لتخزين الغاز في خلية الوقود أعلى بثلاث مرات من البطاريات فيما يتعلق بالطاقة لكل حجم وأكثر فيما يتعلق بالوزن. ومع ذلك ، إذا كنت ترغب في تغطية أكثر من 1000 ميل بحري ، فإننا نوصي بالعبور بالقرب من السطح مع نهج أكثر تقليدية مثل الديزل والكهرباء. المفهوم يسمح بذلك ".
خلايا الوقود الهيدروجينية هي تقنية مجربة مستقلة للهواء لغواصات تايسنكروب. تتمتع الشركة بخبرة عميقة مع خلايا وقود الهيدروجين في الغواصة الألمانية HDW Class 212A بالإضافة إلى غواصات أخرى. قد تكون البطاريات ضرورية لأحمال الذروة لبعض الحمولات ، لكن معظم تصميمات سيارات MUM الحالية لا تحتوي إلا على بطارية احتياطية / صغيرة الحجم صغيرة الحجم ، كما يقول ثيسنكروب. يتم تصميم وحدة للنقل السطحي أو بالقرب من السطح في الوقت الحالي ، نظرًا لأن نظام خلايا الوقود لديه نقاط القوة لديه لتحمل المهام تحت الماء.
فيما يتعلق بالاتصال بعيد المدى ، وفي مهام طويلة ، تتطلع Thyssenkrupp MS إلى استخدام أجهزة المودم ذاتية الدفع ، أو عقد الاتصالات المستقلة ، مع إمكانية نقل البيانات ثنائية الاتجاه ، لإنشاء اتصالات صوتية بعيدة المدى من خلال سلسلة من هذه العقد ، وكذلك الملاحة المحلية أو تحديد المواقع 3D عبر أجهزة مودم USBL. يتم تطوير هذه في إطار مشروع فرعي يسمى NaviMUM من EvoLogics وسيتم نشره من مجلة مسدس على MUM.
تطلق EvoLogics المفهوم على أنه شبكة متنقلة ذاتية التنظيم تحت الماء ، مع عقد تشكيل محطات الترحيل وكذلك توفير المواقع. سوف يتنقلون بشكل مستقل في منطقة المهمة ، ويحللون بيئة الاتصالات ، ثم يشغلون المنصب ويتصلون لتشكيل شبكة مرنة تحت الماء. يقول وينر أن البعض سيحصل على مستقبل GNSS ، للحصول على إصلاحات دورية للمواقع الحقيقية.
يقول ثيسنكروب: "تحتاج المركبات الكبيرة جدًا مثل MUM على وجه الخصوص إلى أجهزة استشعار قوية وخوارزميات لتفادي العوائق المستقلة وتخطيط إعادة التخطيط". "خوارزميات التحكم ذاتية الضبط التي تعكس مجموعة كبيرة ومتنوعة من التكوينات الممكنة للمركبات ستدعم مفهوم السيارة. يقوم المشروع بتطوير نظام اتصالات وتصفح متنقل مزود بأجهزة مودم LBL / USBL ذاتية الدفع يمكنها إنشاء شبكة وحوض في مركبة MUM لنقلها وشحنها. "
تبني Thyssenkrupp MS إصدارًا صغيرًا من MUM ، بطول 5 أمتار ، وسيكون جاهزًا للاختبار هذا الصيف (2019). سيتم اختبار العديد من المفاهيم ، وخاصة برنامج الحكم الذاتي والاتصالات المتنقلة ، على هذا النظام. وسيتم اختبار التقنيات الأساسية مثل خلية الوقود الهيدروجينية الجديدة وكذلك تصميم بدن الضغط الجديد ، بالحجم الحقيقي ، هذا العام.
من المقرر بناء سيارة MUM حقيقية الحجم في عام 2020 ، مع اختبار وتجارب حتى 2023-24. يتم دعم عملية التطوير من قبل لجنة استشارية من صناعة النفط والغاز بما في ذلك مشغل Equinor وشركة الزلازل PGS ومقاول البحر تحت البحر Boskalis.
وتمتلك الشركة أيضًا ATLAS ELEKTRONIK ، والجامعة التقنية في برلين وجامعة روستوك التي تعمل في المشروع ، على نظام التحكم ومحاكاة النظام على التوالي.
اكتشاف فتحات حرارية مائية تحت سطح البحر في منطقة الركود الاستوائي
. اكتشف العلماء حقلين جديدين للفتحات الحرارية المائية في منطقة دولدرومز، وهي إحدى أقل مناطق المحيط الأطلسي استكشافًا، وتحديدًا في منطقة التحول والصدع الضخمة. يمتد هذا النظام التكتوني النشط عبر سلسلة جبال منتصف المحيط الأطلسي، التي تُشكل أطول سلسلة جبال في العالم. تُعد هذه الأنواع من حقول الفتحات نادرة نظرًا لأنظمة \"الأنابيب\" الهجينة فيها، والتي تتميز بخصائص نموذجية للفتحات الحرارية المائية.")
كسر الجمود في أبحاث القطب الشمالي

التعمق أكثر: التحديات والاتجاهات في صناعة التجريف

غرس بذور الإلهام: استعادة الأعشاب البحرية

من عدم اليقين إلى الميزة: معهد وودز هول لعلوم المحيطات يطلق مبادرات جديدة لشركاء الصناعة
 بنشر أنظمة رصد المحيطات المستخدمة لجمع بيانات بيئية واقعية لدعم اتخاذ القرارات التشغيلية، والنمذجة، والرصد طويل الأجل للمحيطات. © معهد وودز هول لعلوم المحيطات")
تصميم حلقات منع التسرب الدائرية، الجزء 2: موانع التسرب الشعاعية للضغط الخارجي
")
توسيع نطاق الأسطول غير المأهول: من السفن الفردية إلى العمليات على مستوى النظام

فريق بحثي من معهد شميدت للمحيطات يكتشف 31 نوعاً جديداً

تعتزم شركة أوكوس تطوير مركبات تحت الماء غير المأهولة، ومن المقرر تسليمها في عام 2027

شركة فارد تفوز بطلب قياسي بقيمة 800 مليون دولار لسفينة أبحاث أعماق البحار
-171000 "RV11000 من تصميم VARD 9 42 لـ Inkfish (حقوق الصورة: Vard)")
قامت شركتا أورستد وبي جي إي بتركيب أولى الأساسات في مزرعة رياح بالتيكا 2 البحرية في بولندا
-170484 "(حقوق الصورة: فان أورد)")
MTR100: تحديد رواد الأعمال في مجال الصناعات تحت سطح البحر - باب التقديم مفتوح
